研究報告Report
Modeling Drone Crossing Movement with Fitts’ Law
Keywords:Drone / Crossing / User performance model / Fitts' Law / Human-Drone Interaction
Abstract
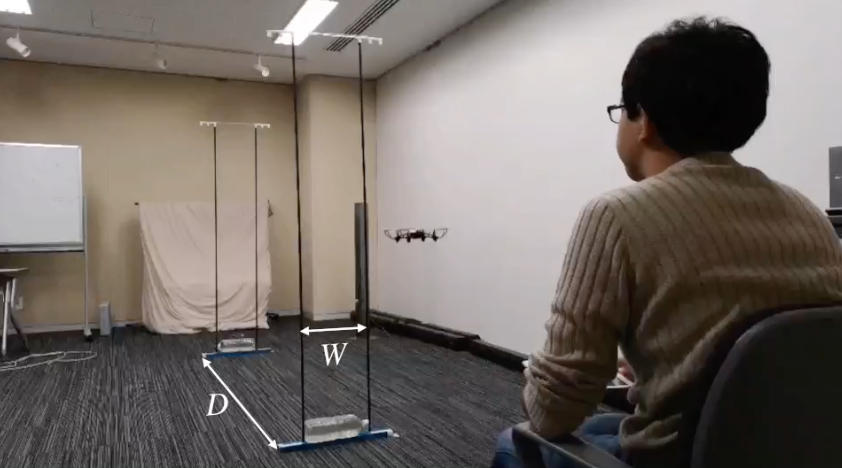
Drones have begun to find extensive use in commercial, scientific, recreational, agricultural, and military applications in recent times. Drone maneuvers involve several pointing and crossing operations.In this regard, previous studies have shown that drone pointing operations can be modeled by the two-part model.In this study, we conduct a crossing operation experiment to control a drone to fly through a frame with a target width.Subsequently, we verify the applicability of Fitts' law and the two-part model to drone crossing operations.Fitts' law and the two-part model are both found to be suitably valid for crossing operations (R^2 >0.940).Upon comparing the AIC values of the two models, we find that Fitts' law, which has fewer parameters, is a better model for the crossing operation.Our results indicate that the drone operation time in crossing operations can be suitably predicted.In addition, based on models, we can compare drones and evaluate interfaces in drone crossing operations.